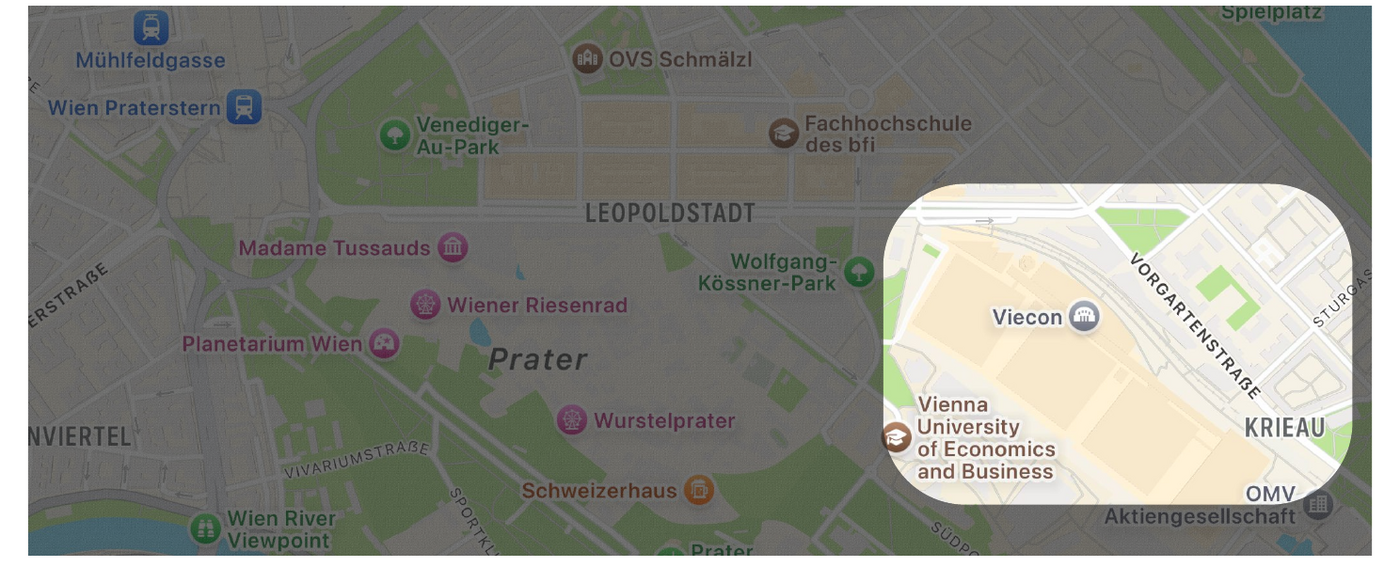
Conference Venue
VIECON - Vienna Congress & Convention Center
Messeplatz 1, 1020 Vienna, Austria
ICRA 2026 · Vienna
A guide for anyone interested in robot learning at ICRA 2026.
VIECON - Vienna Congress & Convention Center
Messeplatz 1, 1020 Vienna, Austria
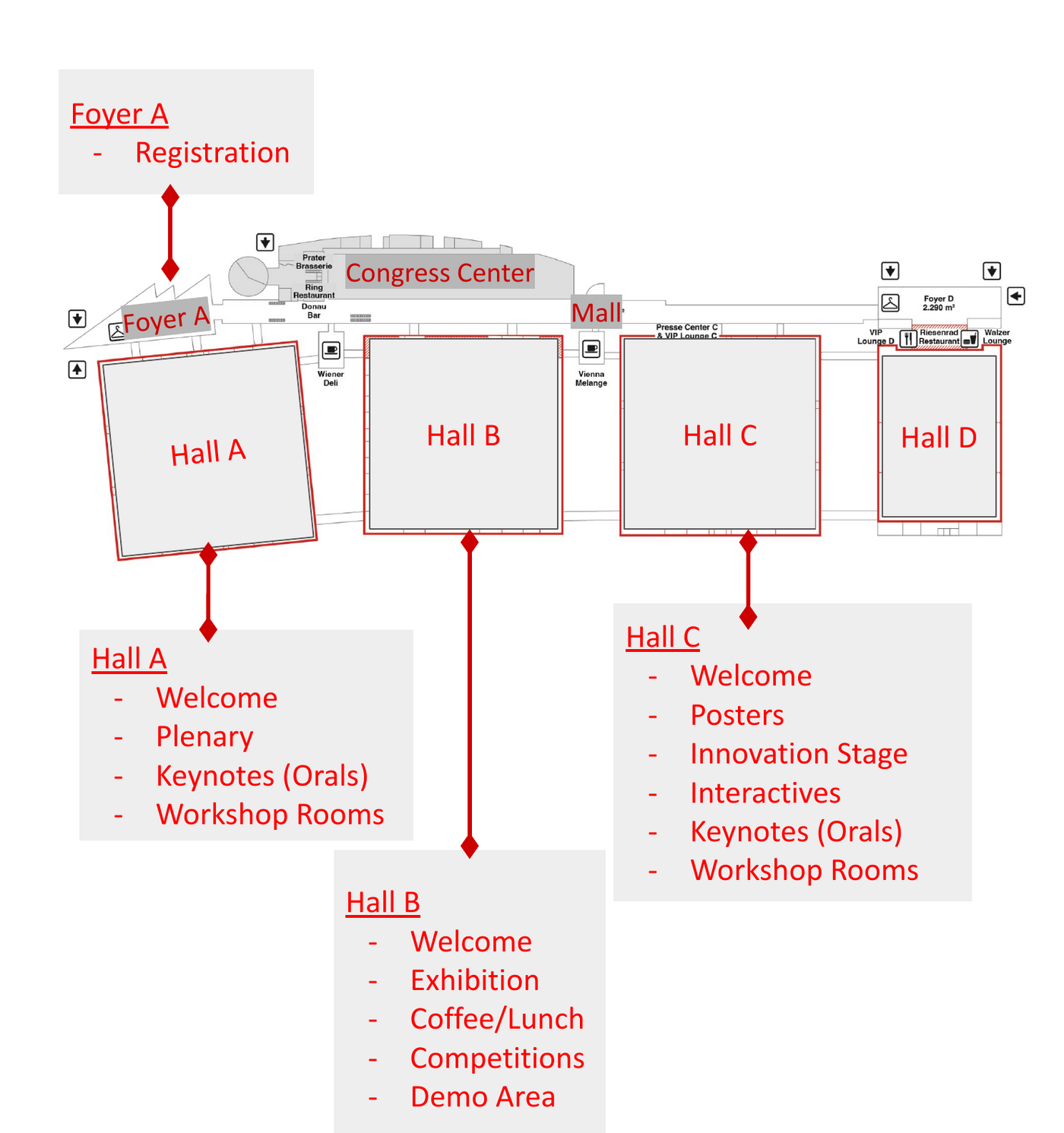
Program
Detailed robot-learning sessions and related TC activity from the welcome kit.
Act to Sense to Act Better: 1st Workshop on Learning and Representations for Active Perception in Manipulation
Synthetic Data for Robot Learning
ViTac - Learning to See and Feel: Vision-Tactile Synergy for Embodied AI
Workshop on Reinforcement Learning in the Era of Imitation Learning
Riemann and Gauss meet Asimov: 3rd Tutorial on Geometric Methods in Robot Learning, Optimization and Control
Learning Agile Vision-Based Quadrotor Flight: From Simulation to Real-World Adaption
Learning to Handle Autonomous Vehicles at the Limits - Lessons Learned from Real-World Autonomous Motorsport
Learning to Navigate: From Scene Understanding to Decision Making
Can GOFE and Code-as-Policy Close the 100,000-Year "Data Gap" in Robot Manipulation?
Learning to Anchor Visual Odometry: KAN-Based Pose Regression for Planetary Landing
DAM-VLA: A Dynamic Action Model-Based Vision-Language-Action Framework for Robot Manipulation
Leveraging Embodied Mechanical Intelligence for Learning Decluttering Tasks
Language-Guided Dexterous Functional Grasping by LLM Generated Grasp Functionality and Synergy for Humanoid Manipulation (I)
Learning Location-Specific Latent Behavior Priors for Occupancy Prediction in Automated Driving
CLF-RL: Control Lyapunov Function Guided Reinforcement Learning
Learning Constraint-Aware Dynamical Systems from Human Demonstrations for Constrained Manipulation Tasks
LLM Trainer: Automated Robotic Data Generating Via Demonstration Augmentation Using LLMs
TARAD: Task-Aware Robot Affordance-Centric Diffusion Policy Learned from LLM-Generated Demonstrations
DAPPER: Discriminability-Aware Policy-To-Policy Preference-Based Reinforcement Learning for Query-Efficient Robot Skill Acquisition
What Matters in Learning a Zero-Shot Sim-To-Real RL Policy for Quadrotor Control? a Comprehensive Study
Latent Action Diffusion for Cross-Embodiment Manipulation
Seeing Motion, Generating Action: Explicit Motion-Aware Policy for Robotic Action Generation
Zero-Shot Exocentric Viewpoint-Robust Imitation Learning (VIL): Bridging Handheld Gripper and Exocentric Views
Behavior Foundation Model for Humanoid Robots
SOE: Sample-Efficient Robot Policy Self-Improvement Via On-Manifold Exploration
From Dream to Action: Hierarchical Policy Learning with 3D World Imagination for Robotic Manipulation
Learning-Based Robust Control: Unifying Exploration and Distributional Robustness for Reliable Robotics Via Free Energy
DexKnot: Generalizable Visuomotor Policy Learning for Dexterous Bag-Knotting Manipulation
Robot Crash Course: Learning Soft and Stylized Falling
Learning on the Fly: Rapid Policy Adaptation Via Differentiable Simulation
Real-World Robot Control by Deep Active Inference with a Temporally Hierarchical World Model
Robot Control Stack: A Lean Ecosystem for Robot Learning at Scale
Rapid Robot Manipulation Policy Learning Via Hierarchical Foundation-Model Prior Distillation
Reinforcement Learning for Stair Locomotion of a Wheeled Bipedal Robot with Contact-Guided Behavior Cloning
Toward Human Preference Optimization for Vision-Language-Action Models: A Pilot Study on the Limits of Imitation Learning
Learning Contact Tasks Skills Based on DMP and Affordance Templates
Learning Traversability Cost Maps with Decomposed Uncertainties Via Continuous-State MEDIRL
Agile Collision Avoidance for Deformable-Tethered Multi-Robot Systems Via Zone-Aware Hierarchical Learning and VLM-Guided Control
Enhancing VLA Precision in Robotic Manipulation Via FiLM-Based Force/Torque-Vision Integration
Flow-Enabled Generalization to Human Demonstrations in Few-Shot Imitation Learning
Unlocking the Potential of Soft Actor-Critic for Imitation Learning
AMPLIFY: Actionless Motion Priors for Robot Learning from Videos
Inference-Stage Adaptation-Projection Strategy Adapts Diffusion Policy to Cross-Manipulators Scenarios
SCOOP'D: Learning Mixed-Liquid-Solid Scooping Via Sim2Real Generative Policy
Viper: Verifiable Imitation Learning Policy for Efficient Robotic Manipulation
Enhancing Classical Motion Planners Using RL with Safety Guarantees
History-Aware Visuomotor Policy Learning Via Point Tracking
ManeuverNet: A Soft Actor-Critic Framework for Precise Maneuvering of Double-Ackermann-Steering Robots with Optimized Reward Functions
Residual Off-Policy RL for Finetuning Behavior Cloning Policies
JuggleRL: Mastering Ball Juggling with a Quadrotor Via Deep Reinforcement Learning
NaviGait: Navigating Dynamically Feasible Gait Libraries Using Deep Reinforcement Learning
Knowledge-Guided Manipulation Using Multi-Task Reinforcement Learning
AURA: Autonomous Upskilling with Retrieval-Augmented Agents
Implicit Maximum Likelihood Estimation for Real-Time Generative Model Predictive Control
An Alignment-Based Approach to Learning Motions from Demonstrations
NavGSim: High-Fidelity Gaussian Splatting Simulator for Large-Scale Navigation
Mimir: Hierarchical Goal-Driven Diffusion with Uncertainty Propagation for End-To-End Autonomous Driving
Augmented Reality for RObots (ARRO): Pointing Visuomotor Policies towards Visual Robustness
An Efficient Learning-Based Task Planning Approach Using a Bio-Inspired Action Context-Free Grammar for Bimanual Manipulation
GLaMP: A Grounded Language Model-Based Multi-Agent System for Long-Horizon Robotic Task Planning in Industrial Settings
Learning from Demonstrations Over Riemannian Manifolds Using Neural ODEs
GRITS: A Spillage-Aware Guided Diffusion Policy for Robot Food Scooping Tasks
Hierarchical DLO Routing with Reinforcement Learning and In-Context Vision-Language Models
FP3: A 3D Foundation Policy for Robotic Manipulation
Do You Know Where Your Camera Is? View-Invariant Policy Learning with Camera Conditioning
Uncertainty Comes for Free: Human-In-The-Loop Policies with Diffusion Models
ETac: A Lightweight and Efficient Tactile Simulation Framework for Learning Dexterous Manipulation
KISS-IMU: Self-Supervised Inertial Odometry with Motion-Balanced Learning and Uncertainty-Aware Inference
Surviving the Paper Deluge: A One-Year Study in Learning from Demonstration
ArthroCut: Autonomous Policy Learning for Robotic Bone Resection in Knee Arthroplasty
Agile in the Face of Delay: Asynchronous End-To-End Learning for Real-World Aerial Navigation
Human2Nav: Learning Crowd Navigation from Human Videos across Robots Via Feasibility-Guided Flow Matching
Hybrid Diffusion Policies with Projective Geometric Algebra for Efficient Robot Manipulation Learning
Shifted Flow Policy: Uncertainty-Aware Time Reparameterization for Visuomotor Learning
Closed-Loop Action Chunks with Dynamic Corrections for Training-Free Diffusion Policy
EMMA: Scaling Mobile Manipulation Via Egocentric Human Data
Better Than Diverse Demonstrators: Reward Decomposition from Suboptimal and Heterogeneous Demonstrations
GRAM: Generalization in Deep RL with a Robust Adaptation Module
VGC-RIO: A Tightly Integrated Radar-Inertial Odometry with Spatial Weighted Doppler Velocity and Local Geometric Constrained RCS Histograms
Mixture-Of-Experts Policy for Smooth and Stable Multi-Posture Fall Recovery in Bipedal Robot
MimicDroid: In-Context Learning for Humanoid Robot Manipulation from Human Play Videos
TOLEBI: Learning Fault-Tolerant Bipedal Locomotion Via Online Status Estimation and Fallibility Rewards
DreamControl: Human-Inspired Whole-Body Humanoid Control for Scene Interaction Via Guided Diffusion
Learn to Teach: Sample-Efficient Privileged Learning for Humanoid Locomotion Over Real-World Uneven Terrain
Learning Humanoid Arm Motion Via Centroidal Momentum Regularized Multi-Agent Reinforcement Learning
Dream to Fly: Model-Based Reinforcement Learning for Vision-Based Drone Flight
Policy Diversification through Representation Distinguishability Regularization for Multi-Actor Deep Reinforcement Learning
MotionTrans: Human VR Data Enable Motion-Level Learning for Robotic Manipulation Policies
Robust Online Residual Refinement Via Koopman-Guided Dynamics Modeling
SVP: Improving Vision-Language-Action Models with Dual Stochastic Visual Prompting
Reinforcement Fine-Tuning of Flow-Matching Policies for Vision-Language-Action Models
ACG: Action Coherence Guidance for Flow-Based Vision-Language-Action Models
Neural Internal Model Control: Learning a Robust Control Policy Via Predictive Error Feedback
PEEK: Guiding and Minimal Image Representations for Zero-Shot Generalization of Robot Manipulation Policies
Placeit! a Framework for Learning Robot Object Placement Skills
R2BC: Multi-Agent Imitation Learning from Single-Agent Demonstrations
Scalable Multi-Objective Robot Reinforcement Learning through Gradient Conflict Resolution
MoE-DP: An MoE-Enhanced Diffusion Policy for Robust Long-Horizon Robotic Manipulation with Skill Decomposition and Failure Recovery
MoRe-ERL: Learning Motion Residuals Using Episodic Reinforcement Learning
Beyond the Majority: Long-Tail Imitation Learning for Robotic Manipulation
Contact-Safe Reinforcement Learning with ProMP Reparameterization and Energy Awareness
VO-DP: Semantic-Geometric Adaptive Diffusion Policy for Vision-Only Robotic Manipulation
Overcoming Imperfect Kinematics in Surgical Robotics through Sim-To-Real Visuomotor Learning
Adaptive Motion Priors with Constrained Optimization
Hierarchical LLM-VLA-Controller Integration for Task Generalization
InSpire: Vision-Language-Action Models with Intrinsic Spatial Reasoning
EDAIL: Adversarial Imitation Learning Via Exploration-Driven Data Augmentation
HAND Me the Data: Fast Robot Adaptation Via Hand Path Retrieval
TWISTED-RL: Hierarchical Skilled Agents for Knot-Tying without Human Demonstrations
Flow before Imitation: Learning Dexterous In-Hand Manipulation with Dynamic Visuotactile Shortcut Policy
A Champion-Level Vision-Based Reinforcement Learning Agent for Competitive Racing in Gran Turismo 7
Learning-Based Observer for Coupled Disturbance
EasyMimic: A Low-Cost Framework for Robot Imitation Learning from Human Videos
ExpReS-VLA: Specializing Vision-Language-Action Models through Experience Replay and Retrieval
Beyond the Teacher: Leveraging Mixed-Skill Demonstrations for Robust Imitation Learning
Simultaneous Deep Model-Based Reinforcement Learning and State Inference under Partial Observability
SoftMimicGen: A Data Generation System for Scalable Robot Learning in Deformable Object Manipulation
Flow with the Force Field: Learning 3D Compliant Flow Matching Policies from Force and Demonstration-Guided Simulation Data
Diffusion Trajectory-Guided Policy for Long-Horizon Robot Manipulation
Beyond Domain Randomization: Safety Certificates for Reinforcement Learning
Reward-Free Continual Adaptation for Resilient Space Robots
Dexora: Open-Source VLA for High-DoF Bimanual Dexterity
HITTER: A HumanoId Table TEnnis Robot Via Hierarchical Planning and Learning
ActivePusher: Active Learning and Planning with Residual Physics for Nonprehensile Manipulation
Scalable Robot Decision Making in the Open World: Planning and Plan Prediction with LLMs
Towards Complex Language in Partially Observed Environments
Traveling the Robot Learning Manifold: A Tale of Geometries and Inductive Biases
Intrinsic Robustness: A Journey from Control-Aware Planning to Robust Robot Learning
URPlanner: A Universal Paradigm for Collision-Free Robotic Motion Planning Based on Deep Reinforcement Learning
SVR-GS: Spatially Variant Regularization for Probabilistic Masks in 3D Gaussian Splatting
Dense-Jump Flow Matching with Non-Uniform Time Scheduling for Robotic Policies: Mitigating Multi-Step Inference Degradation
SCIZOR: A Self-Supervised Approach to Data Curation for Large-Scale Imitation Learning
Deep Sensorimotor Control by Imitating Predictive Models of Human Motion
ViTaS: Visual Tactile Soft Fusion Contrastive Learning for Visuomotor Learning
TADPO: Reinforcement Learning Goes Off-Road
Learning Problem Decomposition for Efficient Sequential Multi-Object Manipulation Planning
Motion Generation for Modular Robots Using Hierarchical Policies
Factorizing Diffusion Policies for Observation Modality Prioritization
End-To-End Low-Level Neural Control of an Industrial-Grade 6D Magnetic Levitation System
Whole-Body Safe Control of Robotic Systems with Koopman Neural Dynamics
Localized Graph-Based Neural Dynamics Models for Terrain Manipulation
GRAPE: Generalizing Robot Policy Via Preference Alignment
CAPS: Context-Aware Priority Sampling for Enhanced Imitation Learning in Autonomous Driving
Data-Efficient Hierarchical Goal-Conditioned Reinforcement Learning Via Normalizing Flows
Rainbow-DemoRL: Combining Improvements in Demonstration-Augmented Reinforcement Learning
AutoFocus-IL: VLM-Based Saliency Maps for Data-Efficient Visual Imitation Learning without Extra Human Annotations
Enhancing Robot Learning through Cognitive Reasoning Trajectory Optimization under Unknown Dynamics
Motion before Action: Diffusing Object Motion As Manipulation Condition
DemoBot: Efficient Learning of Bimanual Manipulation with Dexterous Hands from Third-Person Human Videos
Refinery: Active Fine-Tuning and Deployment-Time Optimization for Contact-Rich Policies
Teaching to Individual Needs: Bidirectional Teacher-Student Learning for Wheeled-Legged Locomotion
Generative Adversarial Imitation Learning for Robot Swarms: Learning from Human Demonstrations and Trained Policies
Learning Affordances at Inference-Time for Vision-Language-Action Models
Knowledge-Based Locomotion Policy for Quadruped Robots under Incomplete Terrain Observation
Knowledge Synthesis in Dynamic Human-Swarm Interactions Using LLMs
Risk-Aware Control of Tendon-Driven Continuum Robots Via CVaR-MPPI with Residual Learning for Hysteresis Compensation : A Pilot Study
WorldPlanner: Monte Carlo Tree Search and MPC with Action-Conditioned Visual World Models
X-Diffusion: Training Diffusion Policies on Cross-Embodiment Human Demonstrations
Multimodal Variational DeepMDP: An Efficient Approach for Industrial Assembly in High-Mix, Low-Volume Production
The Better You Learn, the Smarter You Prune: Towards Efficient Vision-Language-Action Models Via Differentiable Token Pruning
DA-MMP: Learning Coordinated and Accurate Throwing with Dynamics-Aware Motion Manifold Primitives
Learning Task-Invariant Properties Via Dreamer: Enabling Efficient Policy Transfer for Quadruped Robots
ManipForce: Force-Guided Policy Learning with Frequency-Aware Representation for Contact-Rich Manipulation
HoMeR: Learning In-The-Wild Mobile Manipulation Via Hybrid Imitation and Whole-Body Control
Using Non-Expert Data to Robustify Imitation Learning Via Offline Reinforcement Learning
Vision-Based Policy Learning for High-Speed Autonomous Racing
Cross-Embodiment Imitation: Learning a Unified Latent Space for Multi-Robot Control
Robust Robot Navigation through Failure-Aversion Learning
Temporal Action Representation Learning for Tactical Resource Control and Subsequent Maneuver Generation
Flip Stunts on Bicycle Robots Using Iterative Motion Imitation
Diffusion Policy for Robot-Assisted Dressing with Moving Human Arms
Heterogeneous Skill Learning for Asynchronous Multi-Robot Relay Pushing in Complex Environments
Informal evening social with the Technical Committees on Robot Learning, Humanoid Robotics, and Robotic Hands, Grasping and Manipulation.
Space is limited to 150 attendees on a first-come, first-served basis. Confirmations are sent after membership verification.
Beyond Teloperation: Learning from Diverse Human and Simulation Data
Bridging the Gap between Robot Learning and Human-Robot Interaction
From Data to Decisions: VLA Pipelines for Real Robots
Geometry in the Age of Data-Driven Robotics
RoboTac 2026: Embodied Tactile Intelligence in Predictive Perception, Learning, & Control in Grasp & Manipulation: Emerging the Role of Embodiment and Visuo-Tactile-LLM Foundation Models
Scaling Compositional Intelligence for Multi-Agent Robotic Systems
Xplore: Cross-Disciplinary aspects of Exploration in Robotics, Reinforcement Learning, and Search